[1] R. Szeliski. Computer Vision: Algorithms and Applications[M]. 2010.
[2] 塞利斯基, 艾海舟. 计算机视觉:算法与应用[M]. 清华大学出版社, 2012.
1 Geometric primitives and transformations 几何基元和变换
1.1 Geometric primitives 几何基元
2D点
2D点可以用一对数值来表示:\(\boldsymbol{x}= (x, y) \in \mathcal{R}^2\),
也可以用齐次坐标(homogeneous coordinates)表示:\(\widetilde{\boldsymbol{x}}=(\widetilde{x}, \widetilde{y}, \widetilde{w}) \in \mathcal{P}^2 \)。其中,\(4\mathcal{P}^2 = \mathcal{R}^3 - (0, 0, 0)\)表示2D投影空间(2D projective space)。
齐次矢量\(\widetilde{\boldsymbol{x}}\)通过除以最后一个元素\(\widetilde{w}\)转换为非齐次矢量\(\boldsymbol{x}\):\(\widetilde{\boldsymbol{x}} = (\widetilde{x}, \widetilde{y}, \widetilde{w}) = \widetilde{w}(x, y, 1) = \widetilde{w} \overline{\boldsymbol{x}}\)。其中,\(\overline{\boldsymbol{x}} = (x, y, 1)\)是增广矢量(augmented vector)。
2D直线
齐次坐标\(\widetilde{\boldsymbol{l}} = (a, b, c)\)可以用来表示直线方程:\(\overline{\boldsymbol{x}} \cdot \widetilde{\boldsymbol{l}} = ax + by + c = 0\);
两条直线的交点:\(\widetilde{\boldsymbol{x}} = \widetilde{\boldsymbol{l}}_1 \times \widetilde{\boldsymbol{l}}_2\);
连接两点的直线:\(\widetilde{\boldsymbol{l}} = \widetilde{\boldsymbol{x}}_1 \times \widetilde{\boldsymbol{x}}_2\)
利用最小二乘法(least squares)可以求得多条直线的交点或多个点拟合出来的直线。
2D圆锥曲线(conics)
圆锥曲线可以用二次方程写为:\(\widetilde{\boldsymbol{x}}^T Q \widetilde{\boldsymbol{x}} = 0\)。这在多视角几何(multi-view geometry)和摄像机标定(camera calibration)中十分重要。
3D点
同理,3D点可以写为非齐次坐标:\(\boldsymbol{x}= (x, y, z) \in \mathcal{R}^3\),
也可以用齐次坐标表示:\(\widetilde{\boldsymbol{x}}=(\widetilde{x}, \widetilde{y}, \widetilde{z}, \widetilde{w}) \in \mathcal{P}^3\)。
增广矢量\(\overline{\boldsymbol{x}} = (x, y, z, 1)\)可以用来表示3D点:\(\widetilde{\boldsymbol{x}} = \widetilde{w} \overline{\boldsymbol{x}}\)。
3D平面
齐次坐标\(\widetilde{\boldsymbol{m}} = (a, b, c, d)\)可以用来表示平面方程:\(\overline{\boldsymbol{x}} \cdot \widetilde{\boldsymbol{m}} = ax + by + cz + d = 0\);
3D直线
使用直线上的两个点\((\boldsymbol{p}, \boldsymbol{q})\)的线性组合\(\boldsymbol{r} = (1-\lambda) \boldsymbol{p} + \lambda \boldsymbol{q}\),这里限定\(0 \le \lambda \le 1\);
使用齐次坐标可以将直线写为:\(\widetilde{\boldsymbol{r}} = \mu \widetilde{\boldsymbol{p}} + \lambda \widetilde{\boldsymbol{q}}\)。
这种表达方式的缺点是自由度太多(6而不是4)。
使用Plücker coordinates只有4个自由度:\(\boldsymbol{L} = \widetilde{\boldsymbol{p}} \widetilde{\boldsymbol{q}}^T -\widetilde{\boldsymbol{q}} \widetilde{\boldsymbol{p}} ^T\),\(\widetilde{\boldsymbol{p}}\)和\(\widetilde{\boldsymbol{q}}\)是直线上任意非等同的两点。\(\boldsymbol{L}\)还应该满足\(det(\boldsymbol{L}) = 0\),这产生了一个二次约束。
3D二次曲面(quadrics)
类比圆锥曲线可以写出二次曲面方程:\(\widetilde{\boldsymbol{x}}^T Q \widetilde{\boldsymbol{x}} = 0\)。
1.2 2D transformations 2D变换
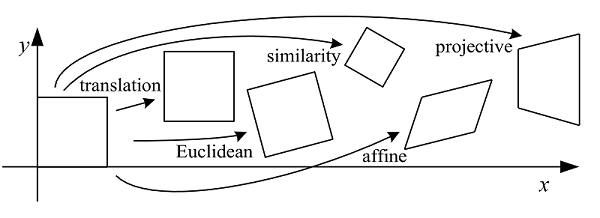
2D变换包括平移(translation)、欧式变换(Euclidean,旋转加平移)、相似(similarity,放缩旋转)、仿射(affine)、投影(projective)。
平移
可以写作\(x' = x + t\);
或者\(x' = \left[ \begin{matrix} \boldsymbol{I} & t \end{matrix} \right] \overline{x}\)。其中,\(\boldsymbol{I}\)是\(2 \times 2\)的单位矩阵。
或者\(\overline{x}' = \left[ \begin{matrix} \boldsymbol{I} & t \\ 0^T &1 \end{matrix} \right] \overline{x}\)。用\(3 \times 3\)矩阵取代\(2 \times 3\)矩阵表达可以使变换链成为可能。
欧式变换(旋转加平移)
可以写作\(x' =\boldsymbol{R} x + t\);
或者
\[x' = \left[ \begin{matrix} \boldsymbol{R} & t \end{matrix} \right] \overline{x}\]其中
\[\boldsymbol{R}= \left[ \begin{matrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{matrix} \right]\]| 是一个正交旋转矩阵,满足\(\boldsymbol{R}\boldsymbol{R}^T=\boldsymbol{I}\)且$$\left | \boldsymbol{R}\right | = 1$$。 |
相似变换(放缩旋转)
可以写作\(x' = s \boldsymbol{R} x + t\);
或者
\[x' = \left[ \begin{matrix} s\boldsymbol{R} & t \end{matrix} \right] \overline{x} = \left[ \begin{matrix} a & -b & t_x \\ b & a & t_y \end{matrix} \right] \overline{x}\]可以看出,这里不再要求\(a^2+b^2=1\)。
相似变换中直线间的夹角保持不变。
仿射
可以写作\(x' = \boldsymbol{A}\overline{\boldsymbol{x}}\)。这里\(\boldsymbol{A}\)是\(2 \times 3\)矩阵。
或者
\[x'= \left[ \begin{matrix} a_{00} & a_{01} & a_{02} \\ a_{10} & a_{11} & a_{12} \end{matrix} \right] \overline{x}\]仿射变换下平行关系保持不变。